CSDN热搜
博客地址:https://www.cnblogs.com/zylyehuo/
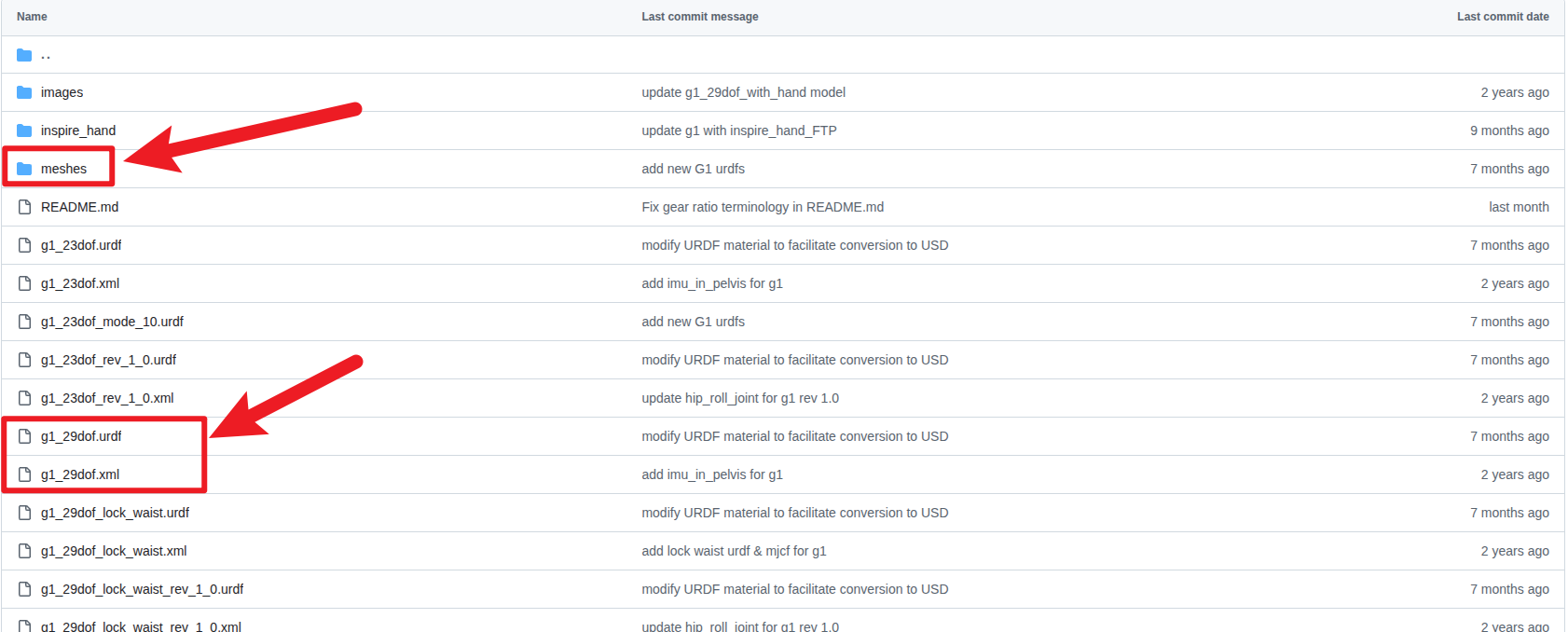
Unitree G1 模型文件下载地址(挑选自己需要的部分,本教程基于 g1_29dof.urdf (以及 .xml 和 meshes 文件夹))
有核心的 URDF 文件和 Meshes (STL 网格文件)
将 g1_29dof.urdf (以及 .xml) 放入 ~/g1_ws/src/g1_description/urdf/
将所有 .STL 文件放入 ~/g1_ws/src/g1_description/meshes/
粘贴到 g1_29dof.urdf 文件末尾(在最后一行的 标签之前)
RDF 文件通常写死了网格路径。如果您的 URDF 是从其他地方导出的,它可能写的是 file:///home/xxx/... 或者 package://g1_description/...
为了确保不报错,执行以下检查:
修改路径:确保所有路径都以 package://g1_description/meshes/ 开头。
(可以使用 VS Code 的“全部替换”功能)
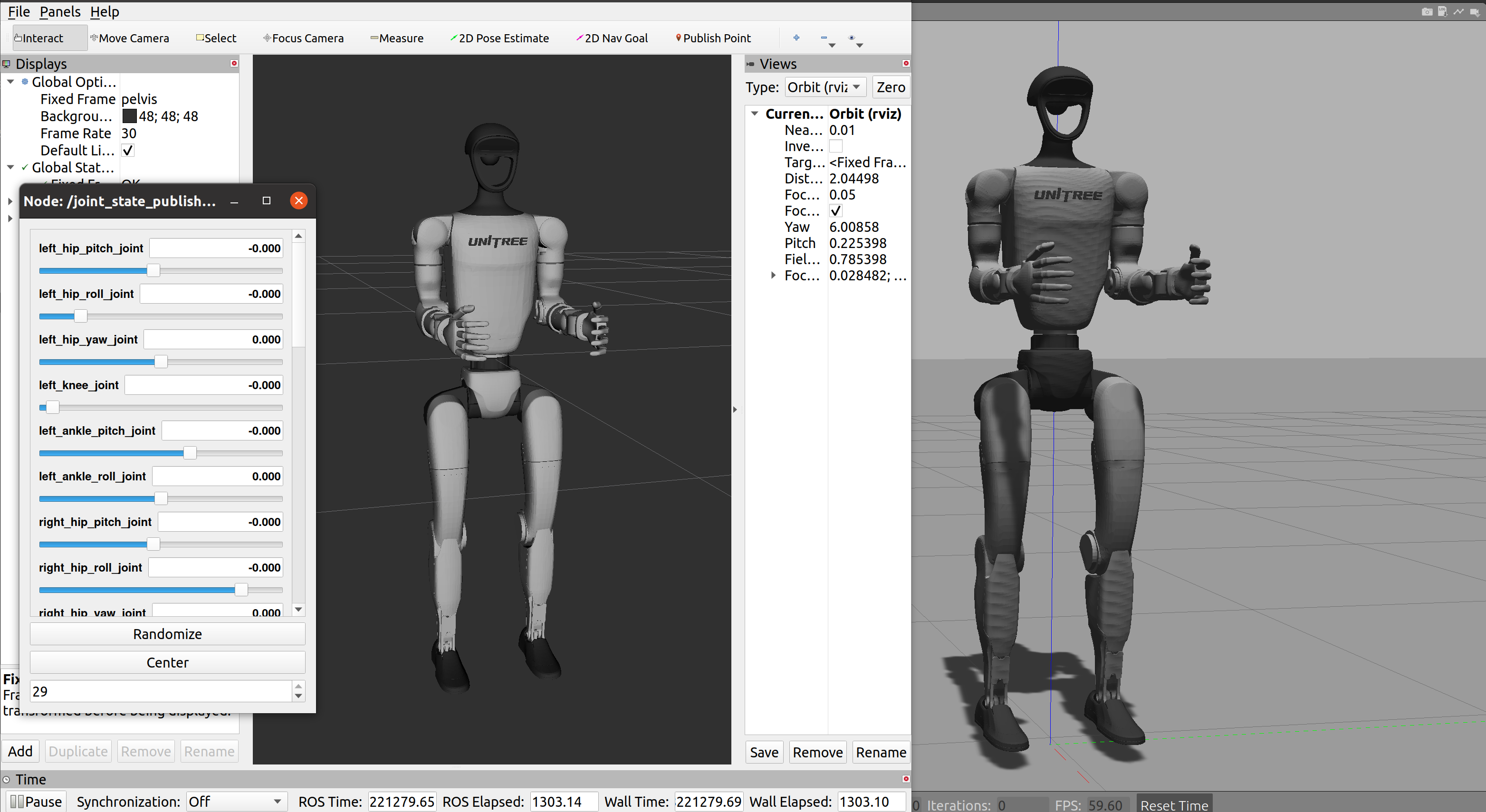
第一次运行时 RViz 可能会报错找不到配置,这是正常的,需要手动添加 RobotModel
Gazebo 打开后,点击底部的 "Play" 按钮。
使用道具 举报
本版积分规则 回帖并转播 回帖后跳转到最后一页
程序园优秀签约作者
0
粉丝关注
26
主题发布


 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 照妖镜
照妖镜



