一阶低通滤波器(Low Pass Filter,LPF)的核心作用是:允许输入信号中频率低于设定截止频率的成分通过(衰减极小),阻隔或大幅衰减高于截止频率的高频噪声,从而获得更纯净的目标信号。
一、一阶低通滤波器定义
对于一阶低通滤波而言,从控制模型上分析就是一个一阶惯性环节,其描述形式如式所示:
\[H\left( s \right) =\frac{1}{Ts+1}\]
\[\text{注:}T=\frac{1}{w_c}\text{,}w_c=2\pi \cdot f_c\text{;}\text{其中,}T\text{为时间常数,}w_c\text{为角频率,}f_c\text{为截止频率}\]
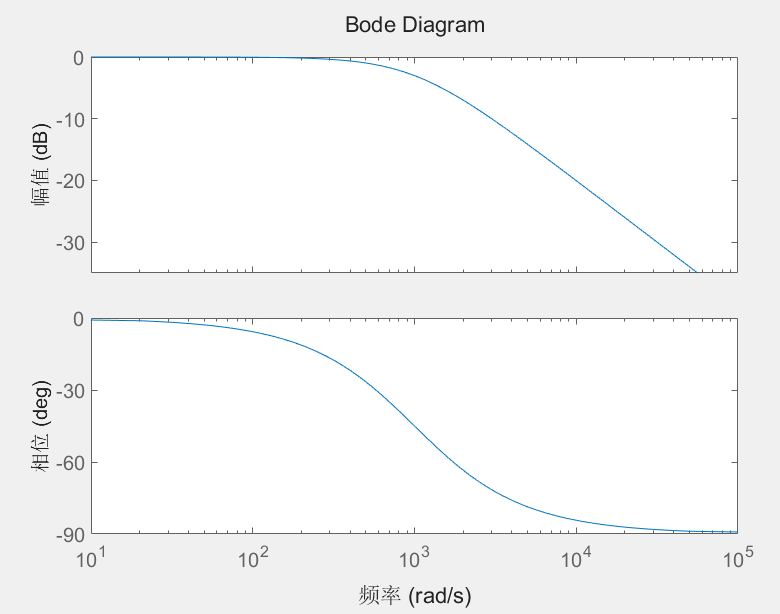
幅频响应:
\[\begin{equation}|H(j\omega)| = \frac{1}{\sqrt{1+(\omega T)^2}} = \frac{1}{\sqrt{1+\left(\frac{\omega}{\omega_c}\right)^2}}\end{equation}\]
相频响应:
\[\begin{equation}\angle H(j\omega) = -\arctan(\omega T) = -\arctan\left(\frac{\omega}{\omega_c}\right)\end{equation}\]
简单来说,一阶低通滤波器就做了一件事:让慢的变化通过,阻隔快的变化。 在实际工程中使用一阶低通滤波器时,需特别注意以下特点:
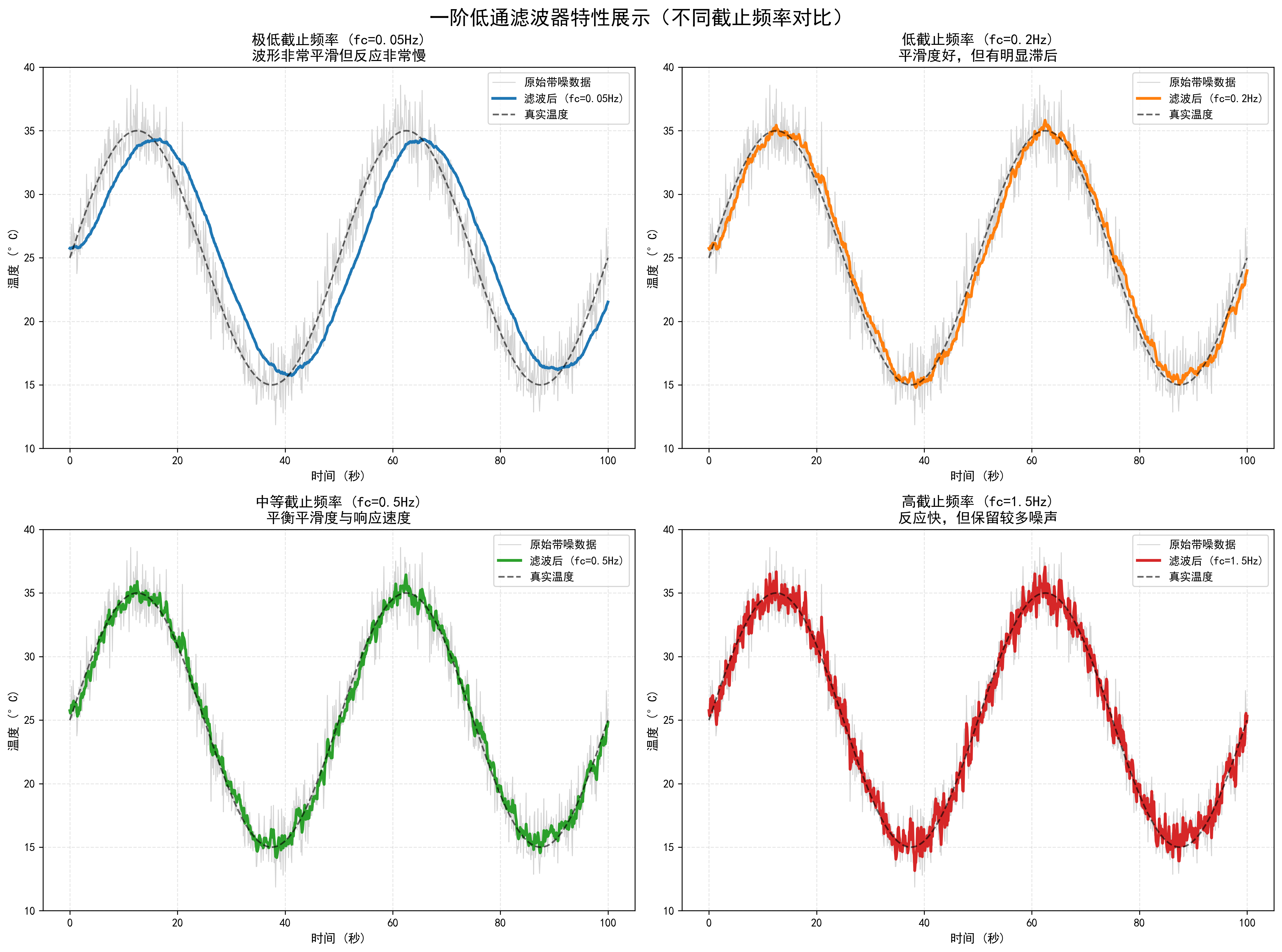
- 平滑效果:它能滤除高频噪声(如 ADC 抖动、电源纹波)。截止频率设得越低,对输入信号变化的响应越慢。
- 相位滞后:输出信号总是比输入信号“慢半拍”。在闭环控制系统(如 PID)中,如果滤波强度过大,会导致系统响应迟钝甚至震荡。
- 衰减特性:在截止频率 fc 处,信号幅度衰减至 -3dB(约为 0.707 倍),相位滞后 -45°
滤波效果对比图如下:
二、一阶低通滤波器的使用
在使用滤波器前,需厘清四个核心概念(以车载 IMU 为例):
- 信号频率:车辆加速度的变化(你想测的,较慢);
- 噪声频率:发动机的震动(你想滤的,较快);
- 采样频率:你采集数据的频率(干活速度,必须足够快以看清噪声并滤除);
- 截止频率:设定的“分界线”,应介于信号和噪声之间。
在实际工程中,我们设计滤波器主要有两个方向:
1、设计传感器(为了达到目标去选硬件)
这是自顶向下的设计思路。当我们明确了需要测量的信号和需要滤除的噪声时,反过来推算硬件需求。
- 确定范围:已知信号频率(如 5 Hz)和噪声频率(如 50 Hz)。
- 设定分界线:选择截止频率 fc 介于二者之间(如 10 Hz)。
- 推算采样频率:为了保证数字滤波算法的准确性,工程上通常要求采样频率大于 10 倍的截止频率(经验值,确保滤波精度)。因此,我们需要选择采样频率至少为 100 Hz 的传感器。
2、使用传感器(有了硬件去调参数)
这是自底向上的调试思路。在硬件采样频率固定(如 IMU 锁定在 100 Hz)的情况下,寻找截止频率的最佳设置区间。
- 算上限:工程上通常要求采样频率大于 10 倍的截止频率(经验值,确保滤波精度),即截止频率小于 10 Hz。
- 看下限:为了保留有效信号,截止频率必须大于信号频率(如 5 Hz)。
- 定参数:在“上限”和“下限”的夹缝中选择一个值(如 8 Hz)。如果信号频率高于上限(如想测 50 Hz 震动),则说明该传感器采样频率不足,无法胜任。
三、C语言实现
使用以下代码,请包含以下公共内容- #include #include /* 双线性变换法需要用到 tanf */#ifndef PI#define PI 3.14159265358979323846f#endif
这是最经典、最稳健的实现方式。它利用上一时刻的输出值进行递推,数值稳定性高,无条件稳定。适用于绝大多数传感器滤波、电机控制等通用场景。若调试中发现数据有明显的相位滞后,可适当增大截止频率。- #include /* 推荐包含标准类型定义 *//** * @brief 后向差分法一阶低通滤波器结构体 */typedef struct{ float alpha; /* 滤波系数 */ float one_minus_alpha; /* 预计算的 (1 - alpha) */ float last_output; /* 上一次滤波输出值 */ float cutoff_freq; /* 截止频率 */ float sample_freq; /* 采样频率 */} LPF_BackwardEuler;/** * @brief 后向差分法一阶低通滤波器初始化函数 * @param filter : 滤波器结构体指针 * @param cutoff_freq : 截止频率 * @param sample_freq : 采样频率 * @retval 0:成功, -1:参数错误 * @note 建议 sample_freq 至少为 cutoff_freq 的 10 倍以获得较好的效果 */int lpf_backward_euler_init(LPF_BackwardEuler *filter, float cutoff_freq, float sample_freq){ if (filter == NULL || cutoff_freq one_minus_alpha = 1.0f - filter->alpha; /* 初始化结构体成员 */ filter->cutoff_freq = cutoff_freq; filter->sample_freq = sample_freq; filter->last_output = 0.0f; return 0;}/** * @brief 后向差分法一阶低通滤波器计算函数 * @param filter : 滤波器结构体指针 * @param input : 当前输入值 * @retval 滤波后的输出值 */float lpf_backward_euler_update(LPF_BackwardEuler *filter, float input){ float output; if (filter == NULL) { return input; } /* 核心公式:y[n] = alpha * x[n] + (1 - alpha) * y[n-1] */ output = filter->alpha * input + filter->one_minus_alpha * filter->last_output; filter->last_output = output; return output;}/** * @brief 重置后向差分法一阶低通滤波器状态 * @param filter : 滤波器结构体指针 * @param init_val : 重置后的初始输出值 * @retval 0:成功, -1:参数错误 */int lpf_backward_euler_reset(LPF_BackwardEuler *filter, float init_val){ if (filter == NULL) { return -1; } filter->last_output = init_val; return 0;}
公式简单,但属于显式欧拉法,只有在特定情况下才稳定。由于对采样频率和截止频率的比例敏感,容易出现发散。除非有特殊的极低频需求或对代码极其简化,否则一般不推荐。- /** * @brief 前向差分法一阶低通滤波器结构体 */typedef struct{ float alpha; /* 滤波系数 (omega * Ts) */ float one_minus_alpha; /* 预计算的 (1 - alpha) */ float last_input; /* 上一次滤波输入值 x[n-1] */ float last_output; /* 上一次滤波输出值 y[n-1] */ float cutoff_freq; /* 截止频率 */ float sample_freq; /* 采样频率 */} LPF_ForwardDifference;/** * @brief 前向差分法一阶低通滤波器初始化函数 * @param filter : 滤波器结构体指针 * @param cutoff_freq : 截止频率 * @param sample_freq : 采样频率 * @retval 0:成功, -1:参数错误 */int lpf_forward_difference_init(LPF_ForwardDifference *filter, float cutoff_freq, float sample_freq){ if (filter == NULL || cutoff_freq one_minus_alpha = 1.0f - filter->alpha; /* 初始化结构体成员 */ filter->cutoff_freq = cutoff_freq; filter->sample_freq = sample_freq; filter->last_input = 0.0f; filter->last_output = 0.0f; return 0;}/** * @brief 前向差分法一阶低通滤波器计算函数 * @param filter : 滤波器结构体指针 * @param input : 当前输入值 * @retval 滤波后的输出值 */float lpf_forward_difference_update(LPF_ForwardDifference *filter, float input){ float output; if (filter == NULL) { return input; } /* y[n] = (1 - Ts/Tau)y[n-1] + (Ts/Tau)x[n-1] */ output = filter->one_minus_alpha * filter->last_output + filter->alpha * filter->last_input; /* 更新历史值:当前输入作为下一次的历史输入 */ filter->last_input = input; filter->last_output = output; return output;}/** * @brief 重置前向差分法一阶低通滤波器状态 * @param filter : 滤波器结构体指针 * @param init_val : 重置后的初始输出值 * @retval 0:成功, -1:参数错误 */int lpf_forward_difference_reset(LPF_ForwardDifference *filter, float init_val){ if (filter == NULL) { return -1; } filter->last_input = init_val; filter->last_output = init_val; return 0;}
通过双线性变换将模拟域映射到数字域。它不仅能利用当前输入,还利用了历史输入和输出,其频率响应特性最接近理论模拟滤波器。适用于对幅频特性要求较高的音频处理、信号分析,或采样频率相对较低的精密控制场合。- /** * @brief 双线性变换法一阶低通滤波器结构体 */typedef struct{ float b0; /* 输入系数 b0 */ float b1; /* 输入系数 b1 */ float a1; /* 反馈系数 a1 */ float last_input; /* 上一次滤波输入值 x[n-1] */ float last_output; /* 上一次滤波输出值 y[n-1] */ float cutoff_freq; /* 截止频率 */ float sample_freq; /* 采样频率 */} LPF_BilinearTransform;/** * @brief 双线性变换法一阶低通滤波器初始化函数 * @param filter : 滤波器结构体指针 * @param cutoff_freq : 截止频率 * @param sample_freq : 采样频率 * @retval 0:成功, -1:参数错误 */int lpf_bilinear_transform_init(LPF_BilinearTransform *filter, float cutoff_freq, float sample_freq){ if (filter == NULL || cutoff_freq b1 = filter->b0; filter->a1 = (K - 1.0f) / denominator; /* 初始化结构体成员 */ filter->cutoff_freq = cutoff_freq; filter->sample_freq = sample_freq; filter->last_input = 0.0f; filter->last_output = 0.0f; return 0;}/** * @brief 双线性变换法一阶低通滤波器计算函数 * @param filter : 滤波器结构体指针 * @param input : 当前输入值 * @retval 滤波后的输出值 */float lpf_bilinear_transform_update(LPF_BilinearTransform *filter, float input){ float output; if (filter == NULL) { return input; } /* 核心公式:y[n] = b0*x[n] + b1*x[n-1] - a1*y[n-1] */ output = filter->b0 * input + filter->b1 * filter->last_input - filter->a1 * filter->last_output; /* 更新历史状态 */ filter->last_input = input; filter->last_output = output; return output;}/** * @brief 重置双线性变换法一阶低通滤波器状态 * @param filter : 滤波器结构体指针 * @param init_val : 重置后的初始输出值 * @retval 0:成功, -1:参数错误 */int lpf_bilinear_transform_reset(LPF_BilinearTransform *filter, float init_val){ if (filter == NULL) { return -1; } filter->last_input = init_val; filter->last_output = init_val; return 0;}
方法稳定性计算量相位/延迟特性核心特点适用场景后向差分法无条件稳定极低 (1次乘法 + 1次乘加)存在相位滞后 (隐式欧拉)最常用,最稳健。系数计算简单,不涉及三角函数。绝大多数场景。 电机控制、传感器去噪、PID滤波。双线性变换法无条件稳定中等 ( 3 次乘加)频率响应最准 (需预扭曲)精度最高。在截止频率处的幅值衰减最准确(-3dB),频率映射保真度最好。高精度要求。 音频处理、精密仪器、精密测量、电源闭环控制。前向差分法有条件稳定 (需 fs > π·fc)极低延迟最大 (显式,多拍滞后)算法简单,但天然引入 1 个采样周期的纯延迟,且易发散。极少推荐。 仅在处理极低频信号且计算资源极其受限时考虑。四、总结
一阶低通滤波器是嵌入式信号处理中最基础、最常用的工具。正确使用它的关键,在于理解信号频率、噪声频率、采样频率与截止频率之间的制约关系。在实际开发中,建议优先采用后向差分法进行实现,根据实际的采样频率和信号带宽,灵活调整截止频率,以达到去噪与响应速度的最佳平衡。
来源:程序园用户自行投稿发布,如果侵权,请联系站长删除
免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作! |


 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 照妖镜
照妖镜



